全国职业院校技能大赛高职组-工业机器人技术应用赛项
设备简介
“工业机器人技术应用”竞赛在“工业机器人技术应用实训平台”上进行,该设备由工业机器人、AGV机器人、托盘流水线、装配流水线、视觉系统和码垛机立体仓库等六大系统组成。
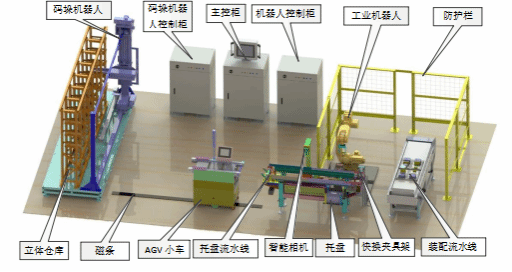
图1 竞赛平台
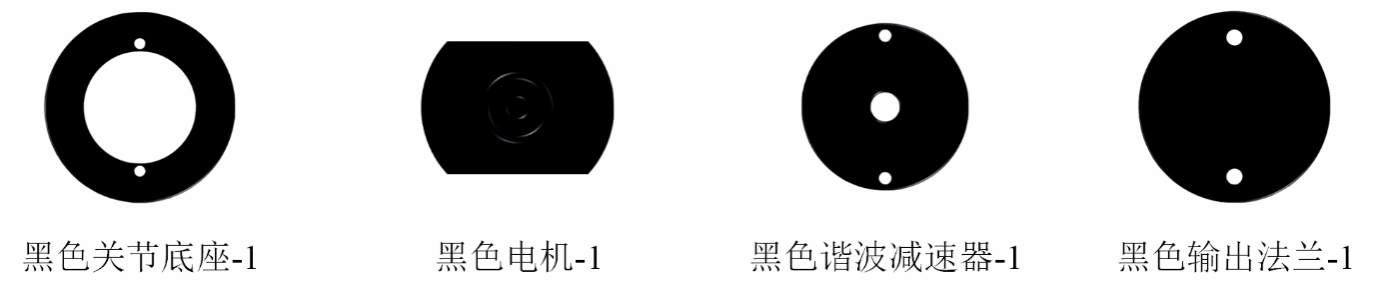
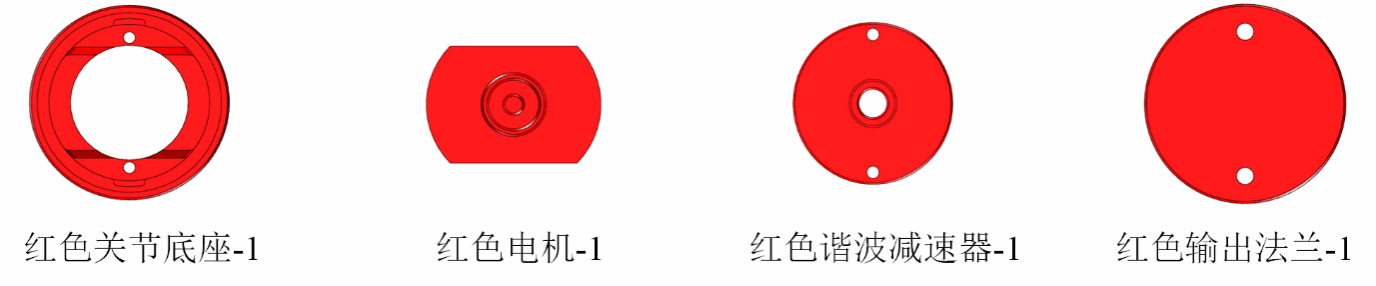
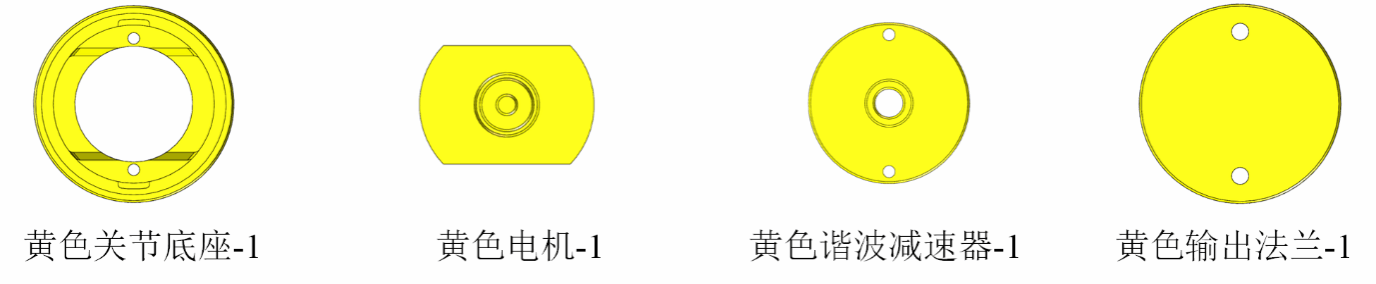
系统的主要工作目标是实现机器人关节的混流生产,基本流程为:码垛机从立体仓库中取出工件放置于AGV机器人上部输送线,通过AGV机器人输送至托盘流水线上,通过视觉系统对工件进行识别,然后由工业机器人进行混流生产,生产完成后,再反向入库。机器人关节由4个工(部)件组成,分别是关节底座、电机、谐波减速器和输出法兰。各工(部)件颜色与类型如图2所示,次品颜色类型如图3所示。




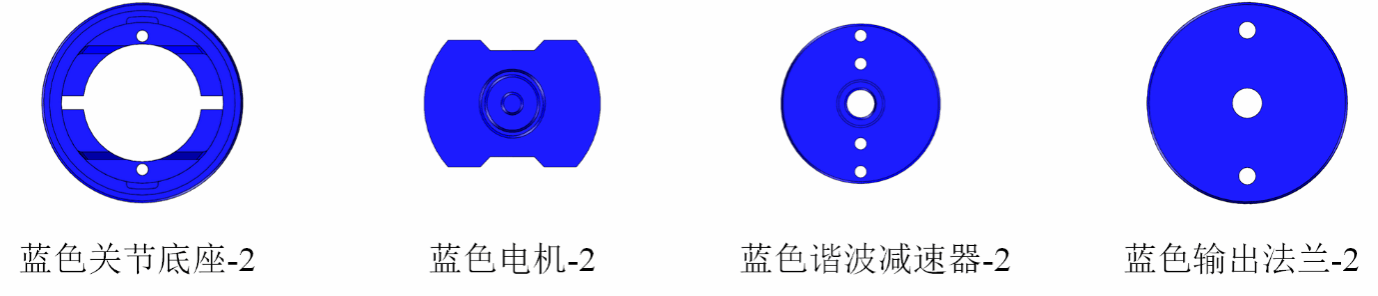
(d)蓝色工件
图2 合格工件

(a)黑色缺陷件

(b)红色缺陷件

(c)黄色缺陷件

(d)蓝色缺陷件
图3 缺陷工件
托盘结构以及托盘放置工件的状态如图4所示,托盘两侧设计有档条,两档条的中间区域为工件放置区。
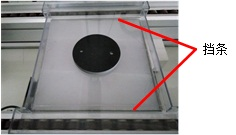
图4 待装配的工件放置于托盘中的状态
系统中托盘流水线和工件装配生产线工位分布如图5所示。

图5 托盘流水线和装配流水线工位分布
装配流水线如图6所示。由成品库G7、装配工位G8和备件库工位G9三个部分组成。定义成品库G7工位的工作位置为装配流水线回原点后往中间运动200mm的位置;装配工位G8的工作位置为在装配流水线中间位置;备件库G9工位的工作位置为装配流水线回原点后往中间运动200mm的位置。
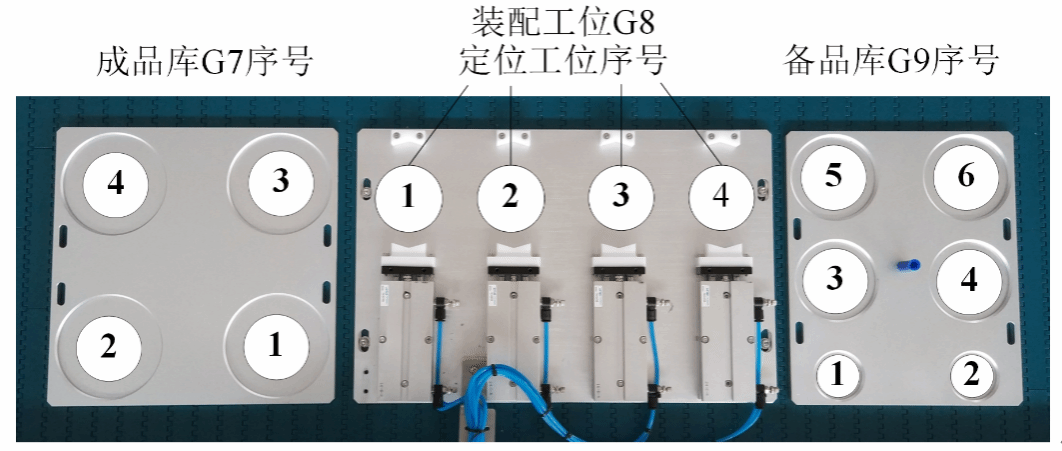
图6 装配流水线
装配工位配置有四个定位工作位,按图6规定为1号位、2号位、3号位和4号位。每个定位工作位安装了伸缩气缸用于工件二次定位,当机器人将工件送至装配工位后,先通过气缸将其进行二次定位,然后再进行装配,以提高机器人的抓取精度,保证顺利完成装配。
备件库主要用于存放电机、谐波减速器和输出法兰等工件,也可以用于缺陷工件的临时存放。
成品库主要用于存放已装配完成的工件,也可以用于其他工件临时存放。
工件在装配工位、备品库、成品库不允许堆叠,一个工件摆放位同时只能摆放一个工件。
立体库仓位规定如图7所示。
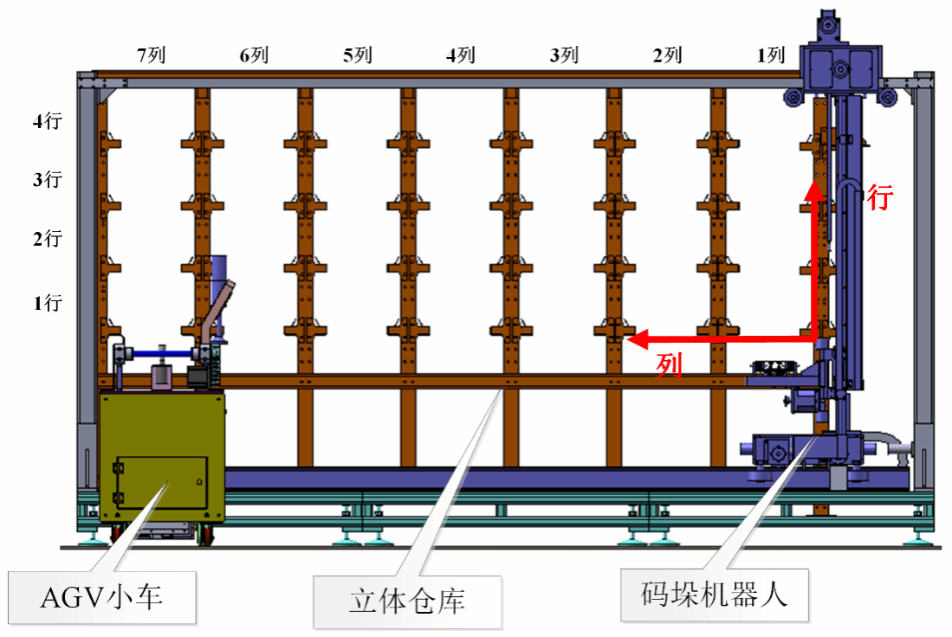
图7 立体库仓位规定

